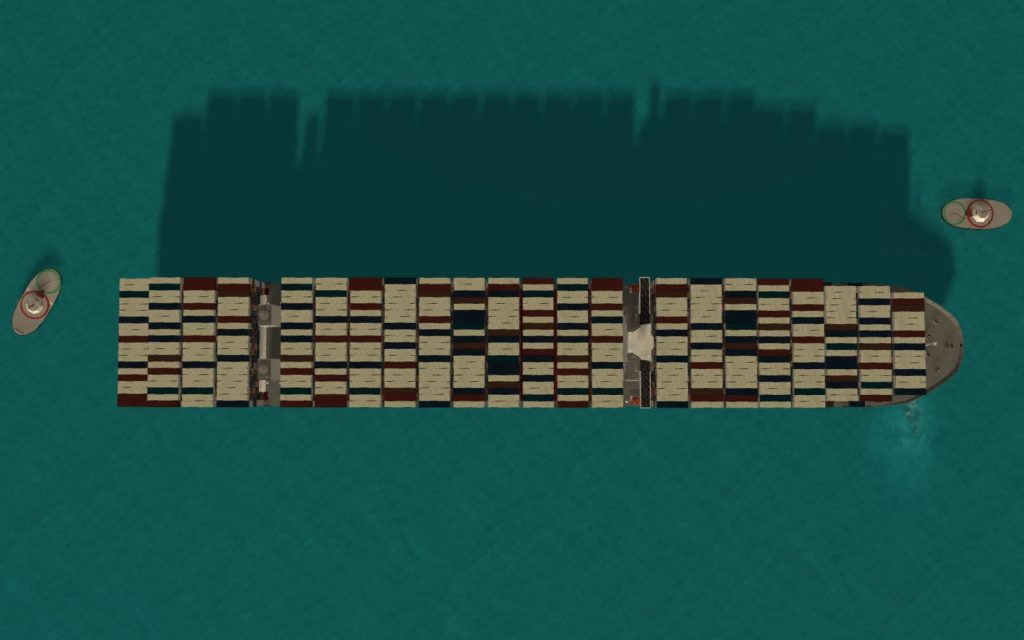
The RoboTug is a product emerged from the project FernSAMS. The main purpose of the project was to find out whether it is possible to use remote controlled harbour tugs (RoboTugs) for the berthing and unberthing manoeuvres of large vessels. Two of the main advantages of this shore side based operation methode are the safe service of the tug crew and the reduction of waiting times respectively the effient use of the skills of tug boat operators.
We conducted this project together with our partners Voith Turbo GmbH & Co. KGaA, McGregor GmbH, TU Hamburg Harburg, BAW Bundesanstalt für Wasserbau, Media Mobil Communication GmbH and Fraunhofer CML.
The RoboTug is a fully equipped unmanned tug, operated from shore side. One operator controlls the tug, monitors the manoever and communicates with the all parties involved. The operator receives support by advanced communication systems, modern control technology and sophisticated remote control algorithms. The basic manouvring skills are that of a RAVE tug.
To provide optimal training for the RoboTug operators, we have upgraded our fullmission Ship Handling Simulator with RAVE Tug handles. This will ensure realistic manouvring for both, RAVE and remote controlled harbour tugs.
Training for RoboTug Operators
For designated RoboTug operators we have developed a special training. This training course will cover the following objectives:
Basic understanding of VOITH propulsion
Fundamentals of technical equipment used in remote control
Practical exercises with the RAVE / RoboTug
Legal aspects
Please note:
Due to technical problems, the MTC cannot currently be reached by phone or email.
We are working on solving this problem as soon as possible.